
摘要: A team of researchers developed microrobot collectives that are able to move in any pattern. The tiny particles are capable of swiftly and effectively changing their swarm behavior. The study is conducted in collaboration with the Max Planck Institute for Intelligent Systems (MPI-IS), Cornell University, and Shanghai Jiao Tong University.
▲圖片來源:dataconomy.com
MICROROBOT COLLECTIVES CAN MOVE IN EVERY FORMATION
Each robot is about the width of a single hair. They’re built out of a polymer and then topped with a thin top layer of cobalt, which 3D prints them in three dimensions. The microrobots are made magnetic thanks to the metal surrounding them. Meanwhile, wire coils that produce a magnetic field when electricity flows through them surround the arrangement. The magnetic field enables particles to be precisely guided around a one-centimeter-wide pool of water in this manner.
The robots, for example, may be maneuvered in such a way that they “write” letters in the water when they form a line. Gaurav Gardi and Metin Sitti from MPI-IS, Steven Ceron and Kirstin Petersen from Cornell University, and Wendong Wang from Shanghai Jiao Tong University published their research project entitled “Microrobot Collectives with Reconfigurable Morphologies, Behaviors, and Functions” in Nature Communications on April 26, 2022.
Microrobot collectives with robust transitions between locomotion behaviors are very rare.
Nature abounds with collective behavior and swarm patterns. A flock of birds, as well as a school of fish, exhibit swarm behavior. Drones may also be instructed to act in swarms, and they have been observed doing so on several occasions.
A drone light show created by a technology business recently won the firm a Guinness World Record by programming hundreds of drones and flying them side-by-side, generating stunning patterns in the night sky. In this swarm, each drone was outfitted with computing power steering in all conceivable directions. But what if the single particle is so minuscule that calculation isn’t an option? One cannot code a robot less than 300 micrometers wide with an algorithm.
The lack of computing capacity necessitates the use of three distinct compensating mechanisms. One is the magnetic force. Opposite-polarity magnets attract one another. Two opposite poles are repelled by each other. The fluid environment, or water surrounding the discs, is the second force at work. Particles move through a whirlpool at different speeds, affecting the particles around them in the system. The speed and size of the current influence how particles interact with one another.
Finally, if two particles float next to one another, they will tend to move together: they bend the water surface in such a way that they gradually come together. This is called the cheerio effect by scientists and fans of cereal: if you put two Cheerios in milk, they will soon bump into each other. On the other hand, this mechanism may also induce things to repel one another.
The researchers use all three forces to generate a collective pattern of motion for dozens of microrobots as one system.
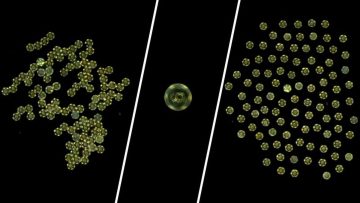
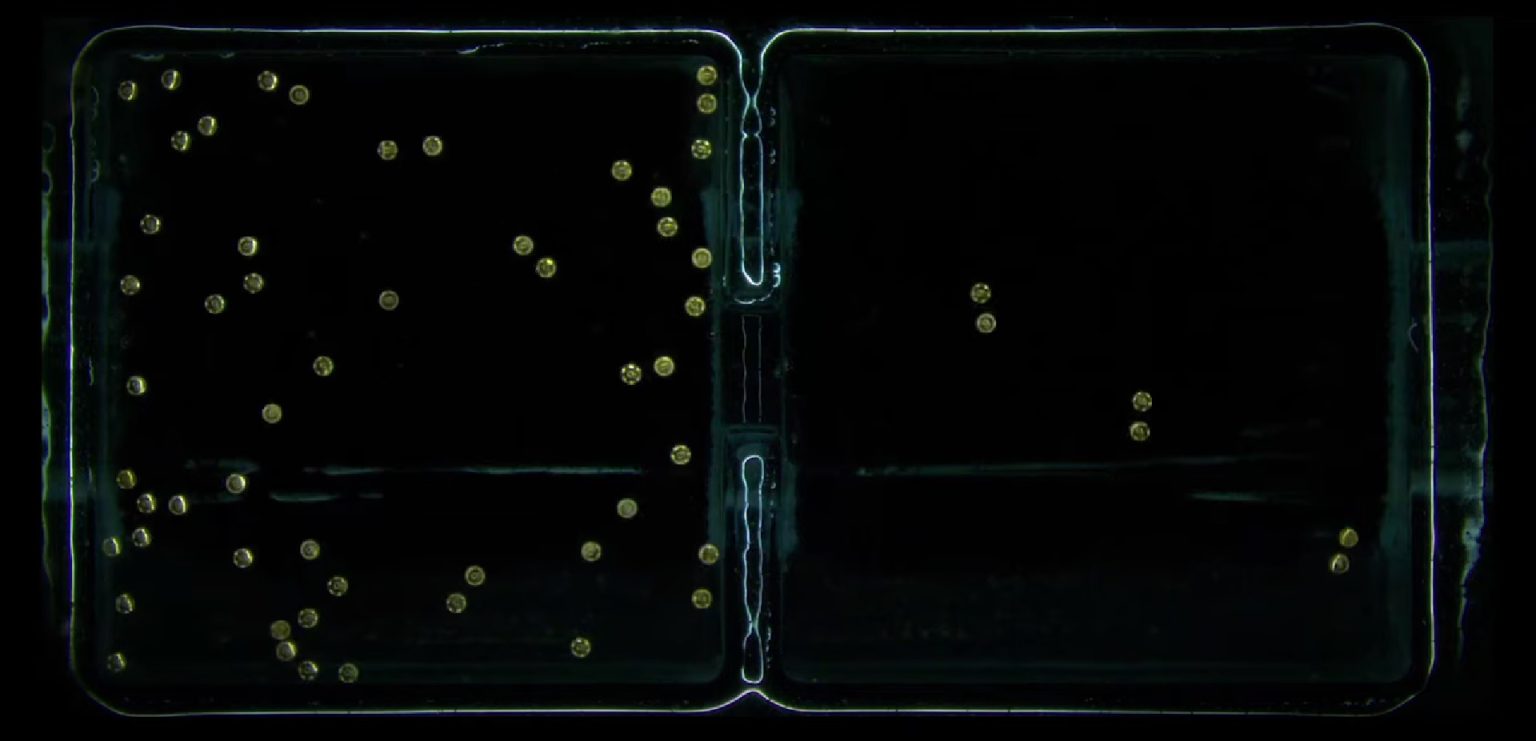
The scientists control the robots through parcour as can be seen in the video above, demonstrating how to choose the best formation for an obstacle course, such as when they emerge from a tight passageway, where the microrobot collectives line up in single file and break away again. The researchers also demonstrate how to individually or in pairs make the machines dance. They also show how they combine several tiny plastic balls into a cluster to push one across.
They may arrange the tiny pieces inside two gears, causing both to spin. With each particle maintaining the same distance from its neighbor, a more organized pattern is also feasible. External computation is used to program an algorithm that generates a spinning or vibrating magnetic field that causes the desired motion and reconfigurability.
Microrobot collectives can be used for biomedical purposes.
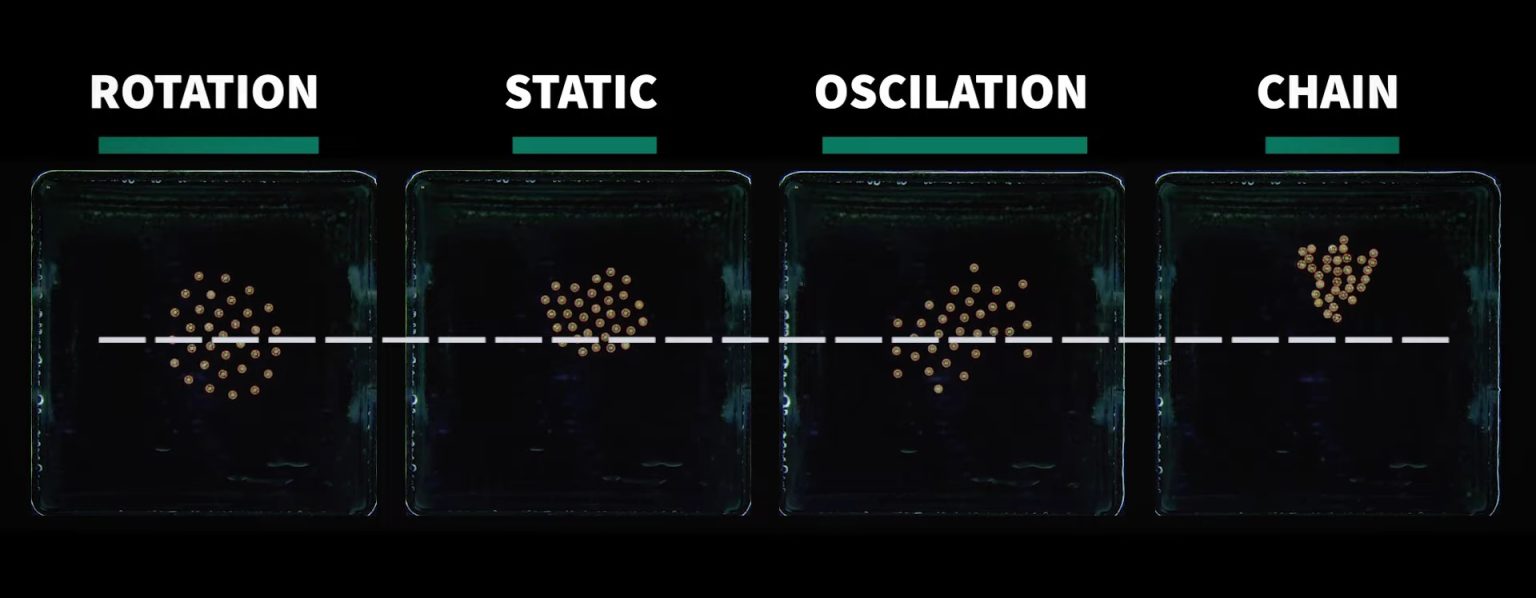
“Depending on how we change the magnetic fields, the discs behave in a different way. We are tuning one force and then another until we get the movement we want. If we rotate the magnetic field within the coils too vigorously, the force which is causing the water to move around is too strong and the discs move away from each other. If we rotate too slow, then the cheerio effect which attracts the particles is too strong. We need to find the balance between the three,” Gaurav Gardi, a Ph.D. student in the Physical Intelligence department at MPI-IS, explains. He is the co-author of the study together with Steven Ceron from Cornell University.
MICROROBOT COLLECTIVES CAN BE USEFUL FOR THE FUTURE OF BIOMEDICAL APPLICATIONS
The future potential of microrobot collectives is to get smaller still.
“Our vision is to develop a system that is even tinier, made of particles only one micrometer small. These collectives could potentially go inside the human body and navigate through complex environments to deliver drugs, for instance, to block or unblock passages, or to stimulate a hard-to-reach area,” Gardi says.
“Microrobot collectives with robust transitions between locomotion behaviors are very rare. However, such versatile systems are advantageous to operate in complex environments. We are very happy we succeeded in developing such a robust and on-demand reconfigurable collective. We see our research as a blueprint for future biomedical applications, minimally invasive treatments, or environmental remediation,” explains Metin Sitti.
轉貼自Source: dataconomy.com
若喜歡本文,請關注我們的臉書 Please Like our Facebook Page: Big Data In Finance
 jovigev251
jovigev251 
留下你的回應
以訪客張貼回應